CSM-Suspension
CSM = Chainless Suspension Movement
The rear suspension responds to bumps as if the chain wasn't there, because chain tension has very little leverage on the rear triangle.
Benefits of CSM-Suspension
To get to the most important point: CSM-Suspension make it easier to ride a mountain bike.
CSM-Suspension does this in a number of ways, because the frames are designed using Statics theory instead of anti-squat. By using statics theory, I specifically reduced the leverage the chain has on suspension movement by making the chain tension force vector over-center to the suspension link that is the front triangle. Anti-squat generally gives similar results, because the more anti-squat you have, the more leverage you have.
To understand what is going on with CSM-Suspension, it’s important to recall the principal of “degrees of freedom”. In simple terms, it means whatever is easier to do is what happens. For example, when climbing, most of the rider’s weight is on the rear wheel/triangle. Because there isn’t much weight on the front triangle, it rotates about the rear triangle (due to chain tension) when climbing. In other words, when climbing, the front triangle has a greater degree of freedom to move than the rear triangle.
The main points of CSM-Suspension:
- The rear suspension moves as if the chain wasn’t there. (See point A below for explanation).
- There is no pedal kickback. (Point B below)
- Instead of stiffening the suspension or causing pedal kickback, the rear wheel rotates forward to accommodate chain growth. (Point C below)
- There is more traction available at the rear wheel compared to other bikes. (Point D below)
- The bikes are very fast. (Point E below)
- The bike is very “smooth” feeling. (Point F below)
Explanations:
A: 1) There is almost no leverage for the chain to rotate the rear triangle about the front triangle and vice versa. This is because the location of the pivots on the front triangle makes the front triangle over center to the chain tension force vector (when the rear triangle rotates about the front triangle). When chain tension is over center to the front triangle, it can’t apply a torque to the front triangle. 2) When the front triangle rotates about the rear triangle, each of the pivots on the front triangle receive half of the chain tension force. Each of the pivots then uses the leverage generated by chain tension to try to lift the rider vertically. There isn’t enough leverage to lift the rider, so chain tension can’t lift the rider or stiffen the suspension. (All other designs use leverage to move the main pivot about the IC.) What happens with CSM-Suspension is chain tension serves to steady the front triangle, in much the same way that using two hands to swing a bat or club is “steadier” than using one hand. This is one of the reasons the bikes feel steadier than other bikes.
B: Because the rear suspension linkage doesn’t have much leverage to lift the rider, the “opposite” is also true (Newton’s laws): Chain tension (created when the rear suspension compresses) does not have enough leverage to rotate the cranks backwards against pedal pressure. Therefore, it’s easier to push the bike/rider forward or rotate the rear wheel over a bump than it is to lift the rider (stiffen the suspension), or cause pedal kickback.
C: Since there is no pedal feedback and the suspension moves like the chain isn’t there, yet there *is* chain growth, the only thing that can be happening is the rear wheel rotates forward to accommodate chain growth. Chain tension uses the rear hub to rotate the rear wheel forward to accommodate chain growth. Put simply, bumps cause the rear wheel to rotate faster.
D: Particularly when pedaling uphill or on flatter terrain, when the rear wheel goes over a bump, the tire contact patch has to cover a longer distance than the rider. (The distance the rider travels is the hypotenuse of a triangle. The other two sides of the triangle are the distance the rear wheel has to travel.) Because the rear wheel rotates forward when the suspension compresses, the tire’s contact patch stays in the static friction regime much of the time, which is “stickier” than the sliding friction regime. (It’s harder to get something to start sliding than it is to keep it sliding.)
E: People often push a harder gear on CSM-Suspension bikes compared to other bikes, with the same perceived effort. Energy lost to bumps on other bikes is recovered on CSM bikes by rotating the rear wheel forward. Additionally, any suspension movement not caused by a bump *also* causes the rear wheel to rotate forward, so poor pedaling technique does not waste as much energy. Pedal feel is essentially the same anywhere in the suspension travel, because suspension movement doesn't cause pedal kickback. There is less bump energy transferred to the rider because chain tension caused by bumps does not tug on the front triangle, resulting in less rider fatique. There is no reason to reduce suspension movement, so there is no need for an electronically controlled shock.
F: The reason the bikes feel so smooth is the cumulative result of points A, B and C above. Because chain tension doesn’t produce much leverage between the front and rear triangles, it doesn’t provide significant support the rider. What that means in real life is the front triangle/rider is isolated from bumps, and it kind of feels like you are floating. The reasons why: 1) The rear suspension is extremely supple, which makes all bumps feel smaller. 2) When the rear wheel/triangle rotates about the front triangle, the front triangle is not “tugged” by chain tension, so the bike/rider doesn’t pitch forward. Rear suspension movement feels completely independent of the front triangle/rider. CSM bikes do not need a mass damper.
If you are sensitive to suspension performance, a CSM-Suspension bike can bend your brain the first time you ride it. By “bend your brain” I mean your body tells you that you are pedaling a hardtail. You see bumps in the trail ahead, your body “knows” you’ll feel them through your feet, but when you pedal over the bumps, you don’t feel them through your feet. Your senses disagree so your brain feels weird for a second. If you feel it, you’ll only feel it a few times before their brain re-calibrates.
Theory
Explanations for the differences in the amount of pedal bob, when comparing the same type of suspension (two different Horst Link bikes, two different Dual Link bikes, etc.), have been centered around differences in the amount of Chain Growth/Pedal-kickback, Leverage rate applied to the rear shock, Axle Path, link rotation direction (clockwise or counter clockwise), Instant Centre migration path, and other factors. The same is true when comparing two different suspension types, like Horst Link vs. Dual Link suspension types. However, there is one metric that has been overlooked. This is the leverage generated by chain tension between the rear triangle and the front triangle.
The leverage rate between the front and rear triangles is determined by the relative locations (variables) of:
- Instant Center location
- Rear Axle location
- Bottom Bracket location
- Upper Chain Line, and
- The two Pivot Locations on the front triangle where the rear suspension attaches to the front triangle.
These locations determine how much leverage the rear triangle has on the front triangle and vice versa. This leverage value, combined with chain tension force can be referred to as Counter-Squat. Counter-Squat is the value derived from an analysis of the linkage from a Statics perspective, without taking acceleration of the linkage (rear suspension bicycle) into account. It is reliant on chain tension and the leverage rate between the front and rear triangles. Therefore, the harder a rider presses on the pedals, the higher the amount of Counter-Squat that is produced.
Anti-Squat is determined by the following variables:
- Front and Rear Tire Contact Patches
- Centre of Gravity Location
- Instant Center location
- Rear Axle location
- Upper Chain Line, and
- Instantaneous Force Centre.
Anti-Squat is a dynamic property, which counteracts the rearward weight shift of the rider when the bicycle is accelerating. If there is no acceleration, there is no Anti-Squat force. If the acceleration rate is high, the Anti-Squat force is greater. This is similar to the behavior of Counter-Squat and its relationship to pedal pressure (chain tension).
Counter-Squat and Anti-Squat employ many of the same metrics when they are calculated. This makes it difficult to distinguish between the two, because they employ the same metrics in different ways. It is easier to focus on their significant differences, which are:
- Chain Tension and Leverage Rate between the front and rear triangles, which Anti-Squat doesn’t use, and
- Acceleration Rate and the Centre of Gravity of the rider and bicycle, which Counter-Squat doesn’t use.
Humans have a low power output when compared to a motor. More importantly, humans have a low power to weight ratio when compared to a motorcycle or other vehicle. For example, a motorcycle may have 50 horsepower, and is required to accelerate 400 pounds (a 170lb rider and 230lb motorcycle, with a lightweight motorcycle). The power to weight ratio is 400/50, which is one horsepower for every eight pounds of mass.
A 170 pound human and a 30 pound bicycle total 200 pounds, but a typical/average cyclist may only have about 1/3 horsepower. This results in one horsepower for every six hundred pounds of mass. That is two orders of magnitude less power to weight than a motorcycle. Two orders of magnitude are significant, and the power to weight ratio is the reason acceleration rates for bicycles are low compared to motorized vehicles.
Bicycles with similar Anti-Squat, Chain Growth, Leverage Rate (on the rear shock), and Instant Center location often perform differently when pedaled. If Anti-Squat was the dominant factor when determining suspension efficiency, bicycles with the same amount of those metrics would perform similarly. The reason they perform differently is because different suspension configurations have different amounts of Counter Squat.
In order to understand why the leverage rate/value between the front and rear triangles is important, one must examine how force is transferred from the front triangle to the rear triangle, and vice versa. This is most easily done from a statics perspective with force vectors. There are three force vectors that are involved with force transfer between the front and rear triangles. These are the acceleration force vector, and the two chain tension force vectors.
The acceleration force vector is always parallel to the line formed by the tire’s contact points on the ground. This force vector acts on the rear triangle at the rear wheel’s axle, and is transferred to the front triangle where the rear triangle attaches to the front triangle via the linkage, at the pivotal attachments of the rear suspension to the front triangle. The acceleration force vector is opposed by the force of friction between the rear tire and the ground surface.
The chain tension force vectors are the two force vectors generated by chain tension. They run parallel to the upper chain line; one force vector passes through the rear axle, and the other force vector passes through the bottom bracket. There are two chain tension force vectors because of Newton’s Third Law; “For every action, there is an equal and opposite reaction”. In the case of bicycle suspension, chain tension pulls the rear triangle toward the front triangle at the rear axle, and it also pulls the front triangle toward the rear triangle at the bottom bracket.
Chain tension applies force vectors which are resisted by the pivot locations on the front triangle. The lower pivotal attachment of the rear triangle to the front triangle is always under compression due to chain tension. Depending on the lower link location and orientation, and the location of the IC, the upper link and pivots can be either under compression or under tension.
Where the IC is located relative to the pivots on the front triangle, and whether the upper pivot is under tension or compression, define three different leverage regimes, referred to as: Balance of Torque, Mono Torque, and Pincer. Balance of Torque and Mono Torque bikes correspond to the three classes of Levers in Newtonian physics: First, Second and Third Class Levers. Mono Torque bikes are a special case of Second and Third Class Levers, where the load (or effort, depending on perspective) acts on the fulcrum (the Instant Centre) and lower link front triangle pivot.
The Pincer regime is a special case that develops leverage due to compression force applied to the links joining the front and rear triangles. The compression of the links apply leverage to the links only, not the front or rear triangles. That compression is applied to the link between the two pivots on the front triangle, or the two pivots on the rear triangle.
Leverage and How it Applies to Rear Suspension
This explanation is based in Statics. To simplify the explanation, trigonometry is ignored and all angles are assumed to be 90 degree, “right angles”. However, trigonometry is important, particularly when it involves the Instant Centre (IC), because the further forward the IC is located, the less leverage there is to rotate the front or rear triangles, creating the Counter-Squat force.
If you imagine the rear suspension as a lever, with the rider’s weight applying a load due to gravity, and the IC is the fulcrum, the rear suspension is a Third Class Lever. It is similar to a Stapler.
A First Class Lever is like a see-saw.
The three types of Levers are illustrated below.

Balance of Torque bikes transfer chain tension like two First Class Levers in series. The first Lever calculation uses the rear triangle as the Beam, Pivots A1 and B1 are the Effort and Load points, and the location where the chain tension force vector crosses the line between Pivots A1 and B1 is the Fulcrum. This creates two lever arms, Lever A1 and B1. Because there are two levers, and each lever produces a torque about the Fulcrum (Load point C1) in opposite directions, a Balance of Torque bike is created.
The proportion of chain tension force that acts upon each Pivot A1 and B1 is directly proportional to the length of each Lever A1 and B1. This is a simple Beam Equasion. For example, the proportion of the chain tension force acting on Pivot B1 is the length of Lever A1 over the total length of Levers A1 and B1. See image below.

The forces acting on Pivots A1 and B1 are transferred directly via the link between each set of pivots (same magnitude and direction of force, AKA, Vector Translation) to Pivot A2 and B2. These forces then act on Levers A2 and B2, whose lengths are defined by the distance from Pivots A2 and B2 to the Fulcrum, which on the front triangle is Load point C2.

When comparing the lengths of Levers B1 and B2, Lever B2 is longer than Lever B1. However, the magnitude of the force applied to Pivot B1 and B2 is the same. Because Lever B2 is longer than Lever B1, Mechanical Advantage is obtained, amplifying the Counter Squat force.
Balance of Torque bikes can be made very good at creating the Counter Squat force, but with low amounts of anti-squat to minimize chain growth. Such a configuration would be good for bikes that require the least possible amount of chain growth.
However, they can also be configured to have similar Mechanical Advantage as Mono Torque bikes. The early Santa Cruz VPP bikes were Balance of Torque bikes, but because of the way the links were oriented, very close to Mono Torque bikes in terms of overall leverage.
Mono Torque bikes are a special case of 2nd and 3rd Class Levers (2&3CL), where either the Load or Effort is applied at essentially the same location as the Fulcrum. Leverage is created between Pivot B1 and the location where Lever B1 meets the chain tension force vector. There is only one lever arm, Lever B1, so torque is applied in only one direction, creating a Mono Torque bike.
All of the chain tension force acts upon Pivot B1, and the leverage is proportional to the length of Lever B1. See image below.

The force acting on Pivot B1 is transferred directly (same magnitude and direction of force, AKA, Vector Translation) to Pivot B2. The force then acts on Lever B2, whose length is defined by the distance from Pivot B2 and the chain tension force vector. Pivot B2 and Load point C2 are the same location when Pivots B1 and B2 and the IC are all Over Centre. This is what gives DW-Link bikes their hard tail pedal feel. The lower link is over centre, so it’s in compression due to chain tension. That means there is no flex through the link, and hard tail pedal feel.

When comparing the lengths of Levers B1 and B2 on a Mono Torque bike, Lever B1 and B2 are the same length when Pivots B1 and B2 and the IC are all Over Centre. Since the magnitude of the force applied to Pivot B1 and B2 is the same, and because Lever B1 and B2 are the same length, there is no Mechanical Advantage to amplify the Counter Squat force.
Because there is no Mechanical Advantage amplifying Counter Squat in Mono Torque bikes, you need more overall leverage (longer Lever B1 and B2) to create the same amount of Counter Squat force compared to Balance of Torque bikes. This means a “higher” IC location is required to create a longer Lever B1/B2, which translates to a more rearward axle path.
How CSM-Suspension Works
The Pincer regime occurs when both pivots on the front triangle are at the same elevation or below the IC at sag. This puts both pivots on the front triangle in compression due to chain tension. This configuration makes it much more difficult to rotate the front triangle about the rear triangle, because there is very little leverage available between the two triangles.
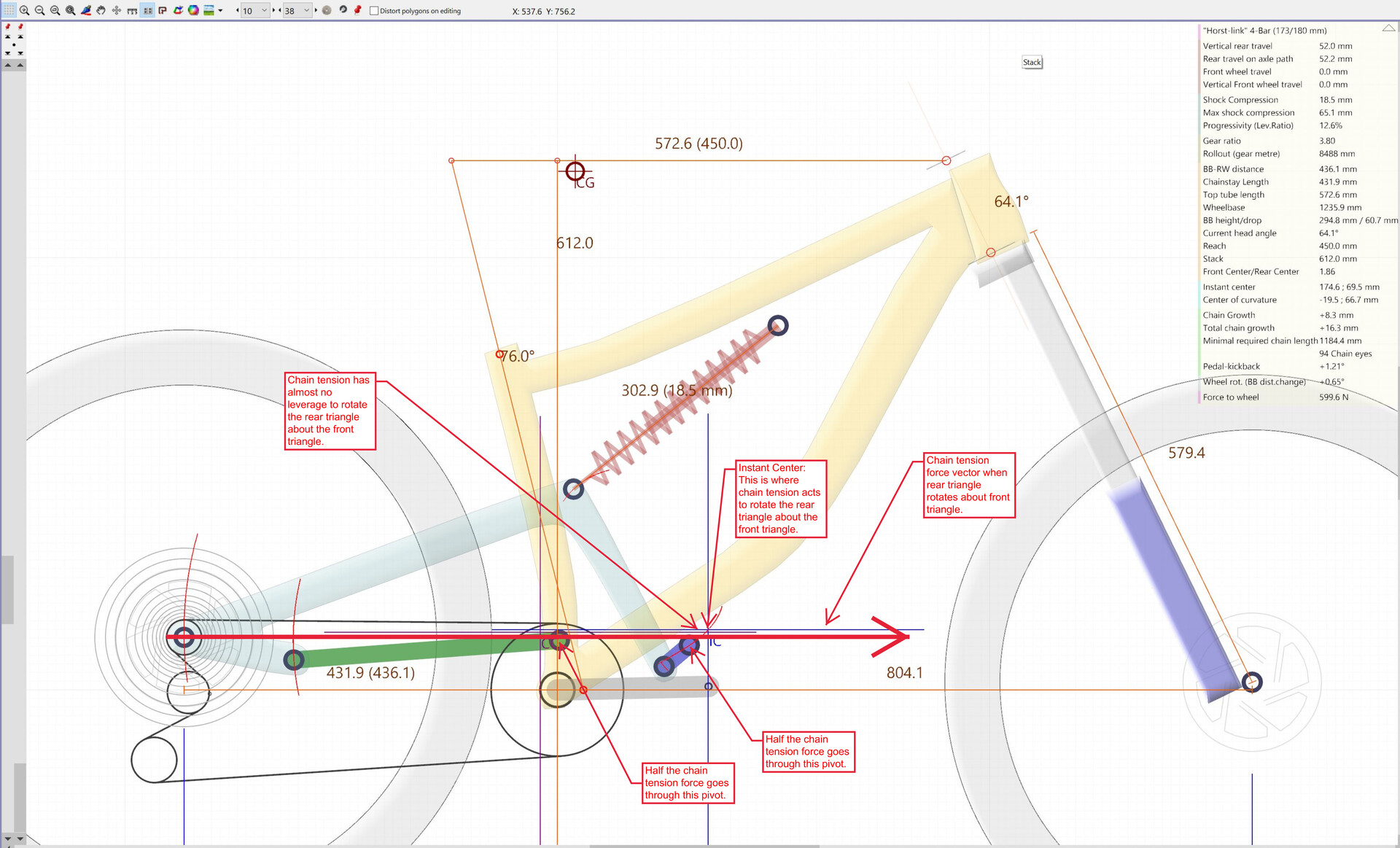
The following image shows the two Chain Tension Force Vectors (CTFVs) on an idealized configuration of a CSM-Suspension bike. There are two CTFVs because of Newton’s 3rd law: “For every action, there is an equal and opposite reaction.” What this means in the context of the CTFV is you have to consider the effects of chain tension from both sides; the chain pulling the rear axle forward (rear triangle rotates about the front triangle), and the chain pulling the bottom bracket rearward (front triangle rotates about the rear triangle).

When the rear triangle rotates about the front triangle, the pivots on the front triangle are over center to the CTFV in certain gear combinations, and mostly over center in all gear combinations. This means that chain tension has very little to no leverage on the suspension system when chain tension pulls the rear triangle toward the front triangle (when the rear triangle rotates about the front triangle).
The image below shows the CTFV when the rear triangle rotates about the front triangle, with a gear combination that makes the CTFV horizontal. The pivots on the front triangle and the IC all align essentially on the CTFV. Because the pivot locations direct the CTFV nearly directly onto the IC, there is no lever to create a torque on the front triangle due to chain tension. That also means there is no torque on the rear triangle due to chain tension. Because chain tension can't apply a torque to either the front or rear triangle, the suspension is able to move as if there is no chain tension. IE, the rear triangle moves as if the chain wasn't there.
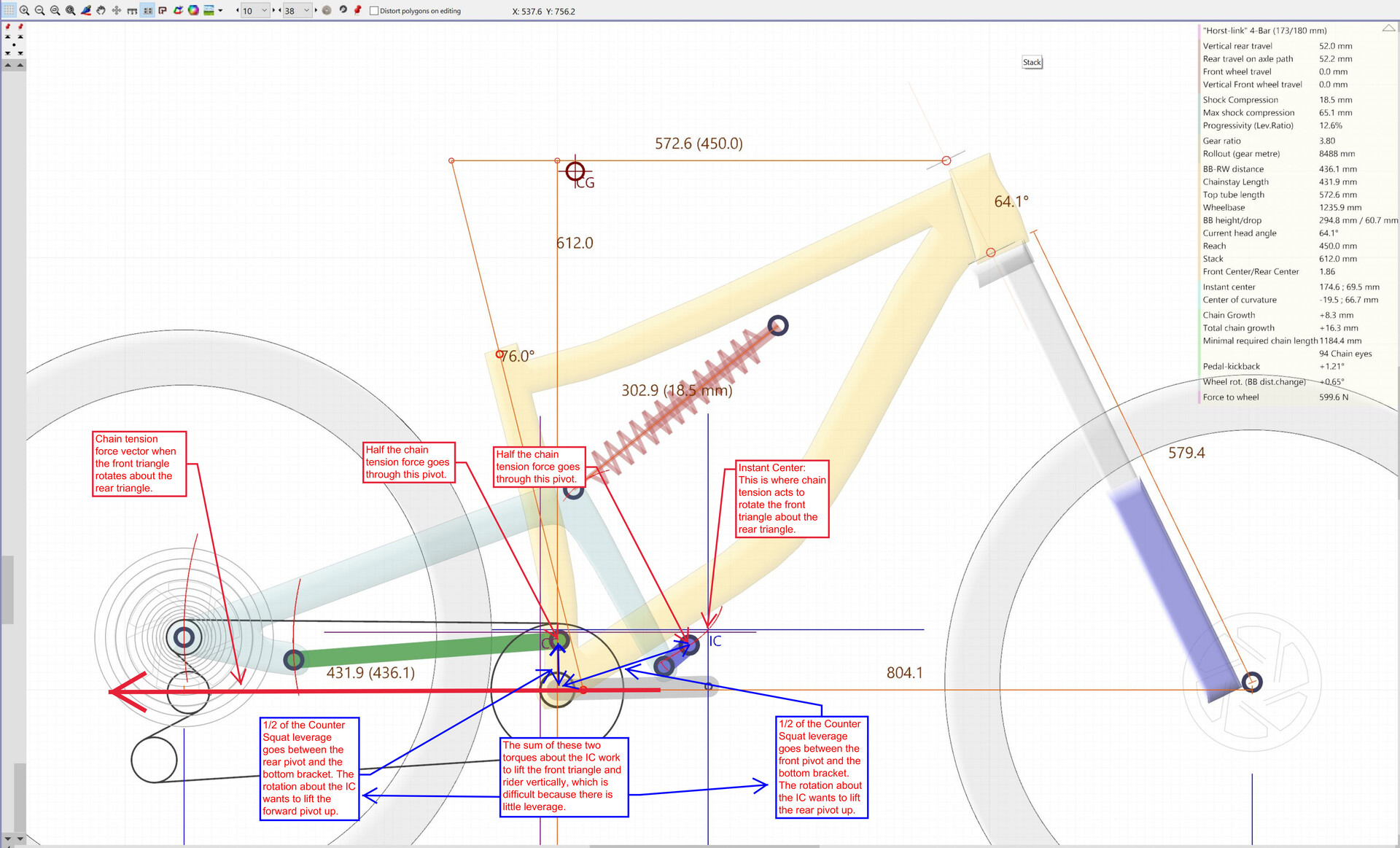
The image below shows the CTFV when the front triangle rotates about the rear triangle. The two pivots each have half the chain tension force to generate torque to rotate the front triangle about the IC. The torque is generated by the leverage chain tension has between the bottom bracket and the two pivots on the front triangle. However, because torque is applied at each pivot on the front triangle, the two torques act to lift the rider vertically between them. Additionally, the two torques stabilize the front triangle in a similar way as holding a bat with two hands.
Other suspension platforms generate most or all torque about the lowest pivot on the front triangle. That results in a lever between that pivot and the IC. Since levers allow small forces to move heavy objects, chain tension has enough force to lift the rider or stiffen the suspension. This is a significant difference between CSM-Suspension and other suspension platforms, because no lever is created to lift the rider with CSM-Suspension.
Get in touch
chris @ csm-suspension.com
© CSM-Suspension | Imprint | Privacy policy

CSM-Suspension
The most sensitive MTB suspension
CSM-Suspension
The most sensitive MTB suspension




